ダイヘンロボットの誕生(1979)
溶接機器を開発していく過程で、お客様からの自動溶接装置への汎用性・フレキシビリティへのニーズを受け、ティーチングプレイバック方式のアーク溶接ロボットを1979年に開発。最初のロボットから既に、いかにカンタンに使っていただくかを追求。いまや、どの溶接ロボットにもある、円弧、直線命令などの機能を開発当初から実現いたしました。

初代マニピュレーター(1980)
日本で本格的ロボット普及の始まりと言われた「ロボット元年」に、5軸直行マニピュレーター THOR-Tを市場に投入。翌1981年には、多関節形5軸マニピュレーター THOR-Kを市場に投入いたしました。

THOR-T

THOR-K
マニピュレーターのラインアップを拡充(1983)
1983年からマニピュレーターのラインアップを拡充(LK,LA,SA・・)、床置き、壁掛け、天吊と様々なシーンに対応できるようにしました。更にロボットの教示(ティーチング)を行うにはティーチペンダントとロボットコントローラ側で各々操作が必要だったものを、業界に先駆けてティーチペンダントに集約!100%手元の操作で、ロボットの教示を行うこができ、教示作業の効率がアップしました。

LK

SA

SR

ティーチペンダント
アルメガG、Vシリーズを市場投入(1988)
1988年独自のハイブリッド構造を採用した5軸マニピュレーター アルメガG、6軸多関節マニピュレーター アルメガVを市場に投入しました。更にこの時期、ウェハ搬送ロボットも市場に投入しました。
Almega G01

Almega V01
シンクロモーション制御誕生(1991)
1991年には、世界初となる複数ロボットの協調制御、シンクロモーションを開発。2台のマニピュレータによる冶具レス協調溶接ロボットシステムや、マニピュレータとポジショナとの協調溶接ロボットシステムを実現しました。
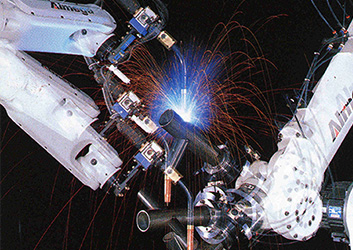
2台のマニピュレータによる
冶具レス協調溶接ロボットシステム
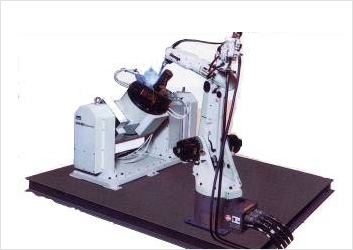
マニピュレータとポジショナとの
協調溶接ロボットシステム
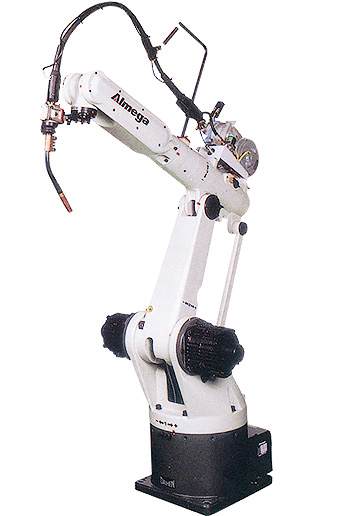
アーク溶接からハンドリングまで、用途を拡大
1994年には、普及機となるアルメガEG/EVを市場に投入。1997年には、ハンドリング用途も考慮した、120Kg可搬のアルメガ V120と、アーク溶接からハンドリング用途までのラインアップを拡大しました。

Almega EG/EV

Almega V120
多彩なアプリケーションに対応 AXシリーズ誕生(2001)
2001年に株式会社不二越との業務提携をスタート。2003年に協同で開発したロボットコントローラを搭載したAXシリーズを市場に投入。アーク溶接、スポット溶接、ハンドリング、シーリングと多彩なアプリケーションに対応。
ダイヘンロボットの世界展開
ダイヘンのロボットは、中国、アジア、欧米を始め世界各国でご利用いただいています。
ダイヘンロボット未来への展望(2011〜)
ダイヘンのロボット開発35年間の集大成が、最新のアルメガフレンドリーシリーズです。「誰でも簡単に高品質溶接を実現できる」をコンセプトに簡単操作を実現しました。ダイヘンは、これからのお客様の使い易さを徹底追及した産業用ロボットを開発してまいります。
